MAESTRO Lessons for Codex CLI: What a 12-System Multi-Agent Evaluation Suite Reveals About Architecture vs Model Choice
MAESTRO Lessons for Codex CLI: What a 12-System Multi-Agent Evaluation Suite Reveals About Architecture vs Model Choice
There is a persistent assumption in the agent-building community that upgrading the backend model is the fastest route to better performance. Swap GPT-4o-mini for GPT-5-mini, the reasoning goes, and everything improves. MAESTRO — a January 2026 evaluation suite from KAUST and collaborators — puts hard numbers behind the counter-argument: MAS architecture is the dominant driver of resource profiles, reproducibility, and cost–latency–accuracy trade-offs, often outweighing changes in backend models or tool settings 1.
This article unpacks MAESTRO’s key findings and maps them directly to Codex CLI’s subagent system, hooks engine, and rollout tracing — the machinery you actually have at your disposal when building multi-agent workflows on the CLI today.
What MAESTRO Actually Measured
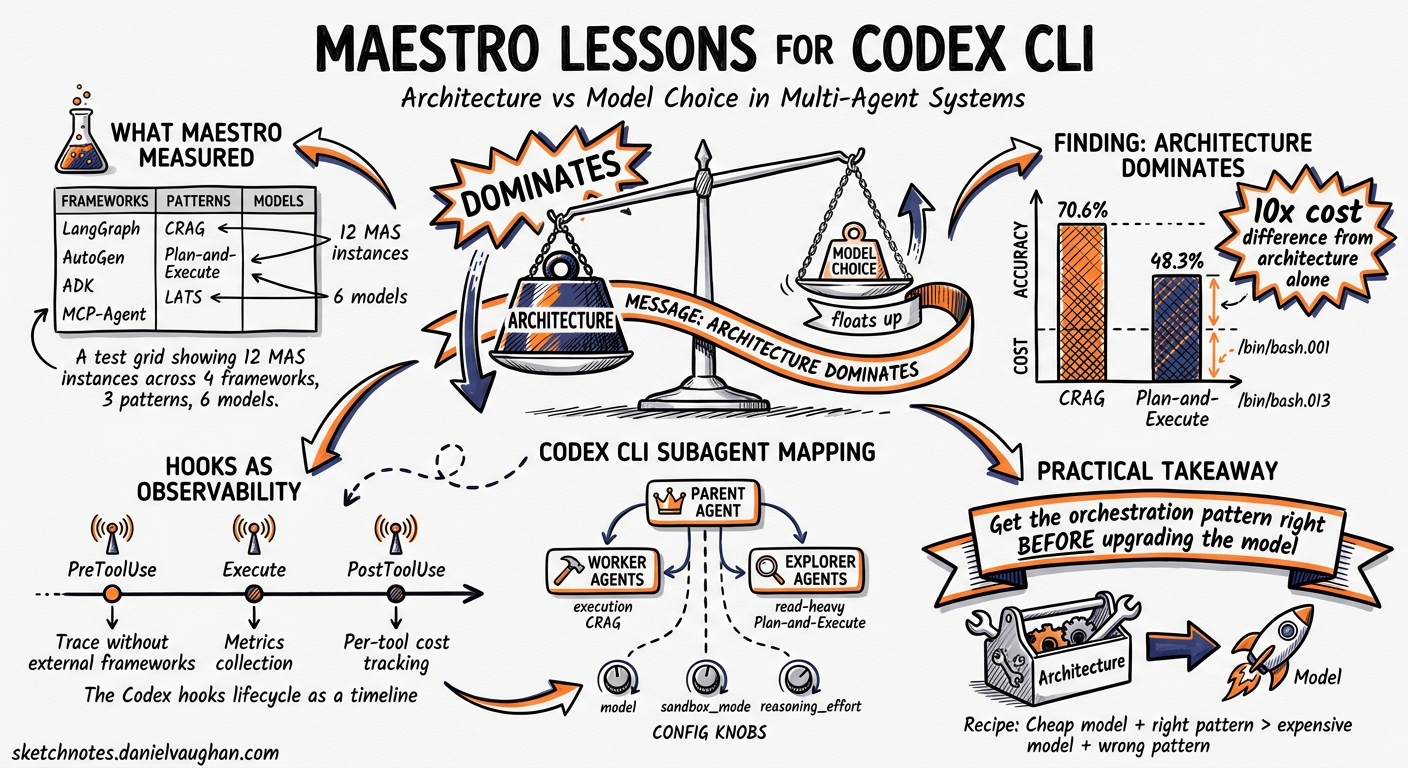
MAESTRO (Multi-Agent Evaluation Suite for Testing, Reliability, and Observability) standardises MAS configuration through a unified interface, exports framework-agnostic execution traces alongside system-level signals — latency, cost, and failures — and integrates both native and third-party MAS via lightweight adapters 1.
The study instantiated 12 representative MAS spanning four frameworks — LangGraph, AutoGen, ADK, and MCP-Agent — across three architecture patterns: CRAG (Corrective RAG), Plan-and-Execute, and LATS (Language Agent Tree Search) 1. Six backend models were tested: Gemini-2.0-Flash-Lite, Gemini-2.5-Flash-Lite, Gemini-2.5-Flash, GPT-4o-mini, GPT-5-mini, and GPT-5-nano 1.
graph TD
A[MAESTRO Evaluation Suite] --> B[12 MAS Instances]
B --> C[4 Frameworks]
B --> D[3 Architecture Patterns]
B --> E[6 Backend Models]
C --> C1[LangGraph]
C --> C2[AutoGen]
C --> C3[ADK]
C --> C4[MCP-Agent]
D --> D1[CRAG]
D --> D2[Plan-and-Execute]
D --> D3[LATS]
E --> E1[Gemini variants]
E --> E2[GPT-4o-mini / GPT-5-mini / GPT-5-nano]
Finding 1: Architecture Dominates Model Choice
CRAG achieved a median cost of $0.0010 per task — more than 10x cheaper than Plan-and-Execute ($0.0126) and LATS ($0.0101) 1. Execution time followed the same pattern: 42.8 seconds for CRAG versus 101.5 seconds for Plan-and-Execute 1. CRAG also posted the highest average accuracy at 70.6%, against 48.3% for Plan-and-Execute 1.
Switching backend models within the same architecture produced smaller shifts. Architecture dependency for CPU consumption ranged from 9.7% (CRAG) to 1.36% (LATS) to 0.07% (Plan-and-Execute) 1. Tool enablement reduced average CPU by only 3.1% and memory by 4.8 MB 1.
The practical takeaway: before experimenting with model upgrades, get the orchestration pattern right. A well-chosen architecture with a cheaper model will typically outperform a poorly chosen architecture with a frontier model.
What This Means for Codex CLI
Codex CLI ships three built-in agent types — default, worker, and explorer — and lets you define custom agents under ~/.codex/agents/ or .codex/agents/ with distinct model, sandbox_mode, and developer_instructions fields 2. The MAESTRO data argues strongly for matching agent type to task shape rather than throwing the most expensive model at everything.
A concrete example: for a codebase exploration task, an explorer agent using o4-mini may outperform a default agent using o3 — not because the model is better, but because the architecture (read-heavy, no write permissions, lower token overhead) fits the task.
# .codex/agents/reviewer.toml — specialised, cheaper, faster
name = "reviewer"
description = "Read-only code reviewer — never writes files"
model = "o4-mini"
sandbox_mode = "read-only"
developer_instructions = """
You are a code reviewer. Analyse the provided files for correctness,
security issues, and style violations. Never propose file edits —
only report findings with file paths and line numbers.
"""
Finding 2: 75% of Failures Are Silent Gray Errors
MAESTRO’s failure analysis revealed that 75.17% of all failures were silent gray errors — outputs that look plausible but lack utility 1. The breakdown:
| Failure Type | Percentage |
|---|---|
| Missing or underspecified output | 47.61% |
| Wrong fact or entity | 27.66% |
| Empty prediction | 15.96% |
| Exceptions | 6.38% |
| Timeouts | 1.86% |
Only 8.24% of failures produced visible crashes (exceptions + timeouts). The remaining 91.76% passed silently — a sobering statistic for anyone relying on exit codes alone to validate agent output.
Detecting Gray Errors in Codex CLI
Codex CLI’s hooks engine — stable since v0.124.0 3 — provides the primary defence against silent failures. A PostToolUse hook can intercept agent output and run validation before the next turn proceeds:
# config.toml — validate subagent output is non-trivial
[[hooks]]
event = "PostToolUse"
tool = "apply_patch"
command = "python3 .codex/hooks/validate-output.py"
The hook script can return exit code 2 to inject feedback back into the model’s context, transforming a passive observer into a gatekeeper 4. This is the Codex equivalent of MAESTRO’s recommendation for runtime validation — checking that output is structurally complete, not just successfully returned.
However, note a current limitation: hooks reliably fire for shell (Bash) tool calls but coverage for apply_patch and MCP tool calls remains inconsistent 5. ⚠️ If your subagent workflow relies heavily on MCP tools, hook-based validation may miss a significant portion of the tool surface.
Finding 3: Structural Stability vs Temporal Instability
MAESTRO measured two dimensions of reproducibility across repeated runs:
- Interaction structure (Jaccard similarity): average 0.86 — agent call graphs were highly stable 1
- Execution order (LCS similarity): average 0.65 — the sequence in which agents ran varied considerably 1
CRAG showed extremely high consistency (0.97 average similarity across model pairs), while LATS and Plan-and-Execute dropped to 0.54 and 0.47 respectively 1.
This means the same agents get called, but in different orders — which matters when agents have side effects or when you need deterministic audit trails.
graph LR
subgraph "Run 1"
A1[Explorer] --> B1[Reviewer] --> C1[Writer]
end
subgraph "Run 2"
A2[Reviewer] --> B2[Explorer] --> C2[Writer]
end
subgraph "Run 3"
A3[Explorer] --> B3[Writer] --> C3[Reviewer]
end
style A1 fill:#4a9eff
style A2 fill:#4a9eff
style A3 fill:#4a9eff
Codex CLI’s Rollout Tracing
As of v0.128.0 (April 30, 2026), Codex CLI records rollout traces capturing tool, code-mode, session, and multi-agent relationships 3. The debug trace reduction command lets you inspect the actual execution graph post-hoc — precisely the kind of observability MAESTRO argues is essential for detecting temporal instability.
Combined with the MultiAgentV2 configuration (also landing in v0.128.0), which introduces explicit thread caps, wait-time controls, and root/subagent context hints 3, you now have the primitives to constrain execution order where determinism matters.
# config.toml — constrain multi-agent execution
[agents]
multi_agent_v2 = true
max_threads = 3
Finding 4: Specialised Agents Beat General Architectures on Cost
The 10x cost differential between CRAG and the general-purpose architectures maps directly to a pattern the Codex community has already discovered empirically: specialised, constrained agents using smaller models drastically reduce token consumption 6.
Codex CLI’s max_threads (default 6) and max_depth (default 1) settings control the blast radius 2. MAESTRO’s data suggests these defaults are reasonable — most of their efficient systems stayed in the sub-GB memory regime with moderate CPU usage 1. But the real savings come from agent specialisation:
flowchart TD
R[Root Agent - o3] -->|spawn| E[Explorer - o4-mini<br/>read-only, exploration]
R -->|spawn| W[Worker - o4-mini<br/>sandboxed, execution]
R -->|spawn| V[Reviewer - o4-mini<br/>read-only, validation]
E -->|results| R
W -->|results| R
V -->|results| R
Each specialised agent uses o4-mini with tight sandbox constraints, while only the orchestrating root agent needs the heavier model. Token consumption scales linearly with thread count 2, so keeping subagents lightweight is where the cost savings compound.
Practical Recommendations
Drawing from MAESTRO’s findings and Codex CLI’s current capabilities:
-
Choose architecture first, model second. Define your agent topology (how many agents, what roles, what communication pattern) before selecting models. MAESTRO shows this decision has 10x cost impact 1.
-
Instrument for gray errors. Use
PostToolUsehooks to validate output completeness. Do not rely on exit codes — 75% of failures will pass silently 1 4. -
Enable rollout tracing. Use the debug trace reduction command to inspect execution graphs across runs. Look for temporal instability (varying execution order) as a signal that your architecture may produce inconsistent results 3.
-
Specialise subagents aggressively. Give each agent the smallest model, tightest sandbox, and most specific instructions that will accomplish its task. The CRAG pattern’s 10x cost advantage came from architectural simplicity, not model sophistication 1.
-
Set explicit thread caps. MultiAgentV2’s
max_threadsand wait-time controls prevent runaway parallelism. Match the cap to your task’s actual parallelism — more threads is not always better 2 3. -
Measure, do not assume. MAESTRO’s framework-agnostic tracing philosophy applies to Codex: export your traces, compare runs, and let the data tell you where the variance lives.
Limitations
MAESTRO evaluated 12 systems across academic benchmarks — not production software engineering tasks. The cost and latency figures are directionally useful but should not be taken as absolutes for Codex CLI workflows. The 75.17% gray error rate was measured across all 12 systems; your specific architecture may fare better or worse. ⚠️ The study tested Gemini and GPT model families — OpenAI’s o3 and o4-mini reasoning models used by Codex CLI were not directly evaluated, though the architectural findings should generalise.
Additionally, Codex CLI’s hook coverage for MCP tools remains incomplete as of May 2026 5, which limits the hook-based validation strategies discussed above.
Citations
-
Ma, T., Chen, Y., Anand, V., et al. “MAESTRO: Multi-Agent Evaluation Suite for Testing, Reliability, and Observability.” arXiv:2601.00481, January 2026. https://arxiv.org/abs/2601.00481 ↩ ↩2 ↩3 ↩4 ↩5 ↩6 ↩7 ↩8 ↩9 ↩10 ↩11 ↩12 ↩13 ↩14 ↩15 ↩16 ↩17
-
OpenAI. “Subagents — Codex CLI.” OpenAI Developers, 2026. https://developers.openai.com/codex/subagents ↩ ↩2 ↩3 ↩4
-
OpenAI. “Changelog — Codex CLI.” OpenAI Developers, 2026. https://developers.openai.com/codex/changelog ↩ ↩2 ↩3 ↩4 ↩5
-
OpenAI. “Hooks — Codex CLI.” OpenAI Developers, 2026. https://developers.openai.com/codex/hooks ↩ ↩2
-
“Inconsistent PreToolUse hook coverage across tool handlers.” GitHub Issue #20204, openai/codex. https://github.com/openai/codex/issues/20204 ↩ ↩2
-
Osmani, A. “The Code Agent Orchestra — What Makes Multi-Agent Coding Work.” AddyOsmani.com, 2026. https://addyosmani.com/blog/code-agent-orchestra/ ↩